VLX移动扫描系统







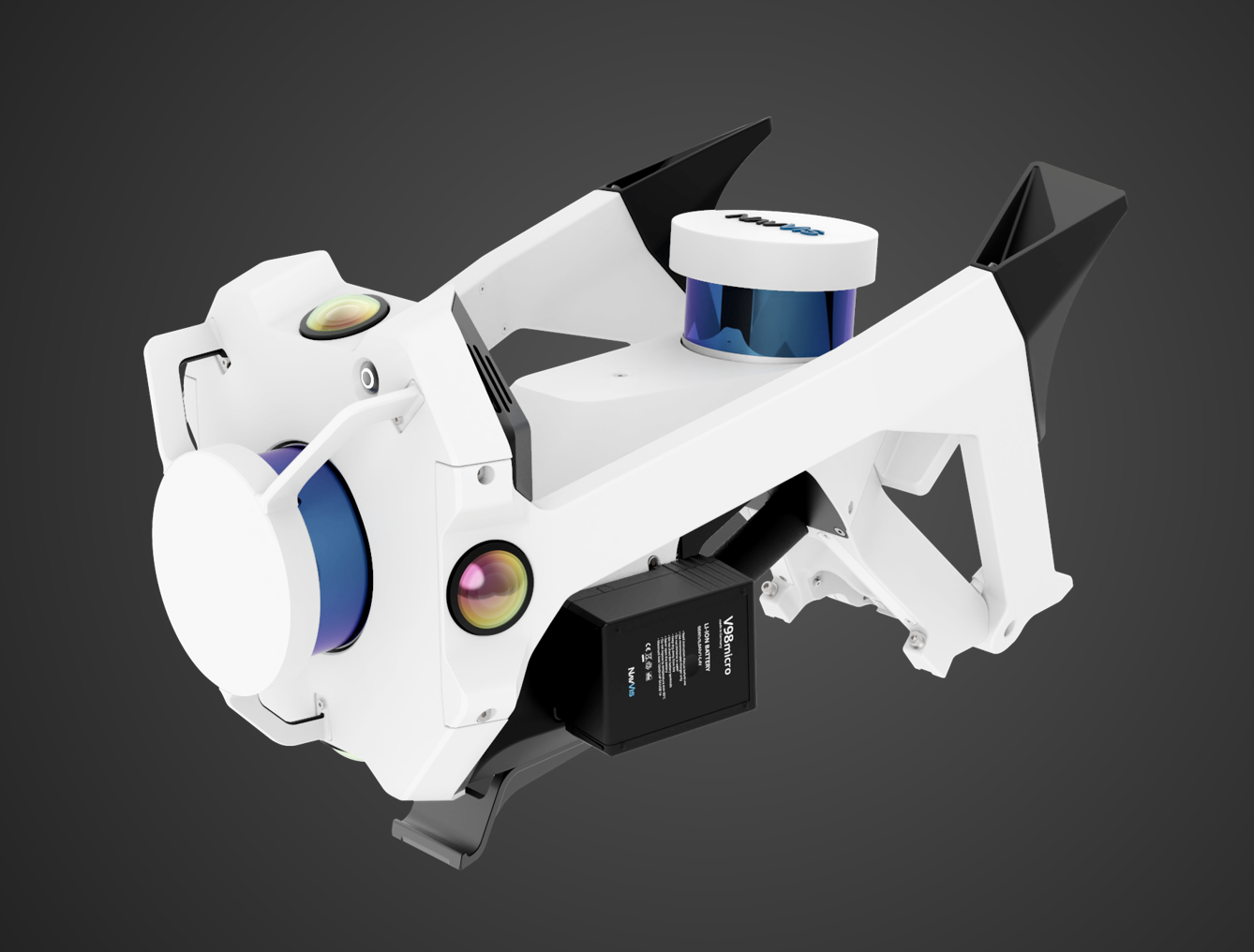
VLX三维移动扫描系统
Indoor mobile mapping system VLX是一款可穿戴式室内移动扫描系统(IMMS),设计用于多合一的现实空间扫描。 VLX通过两个多层激光雷达和四个工业相机快速捕获360°高分辨率图像和精确点云。它使用6D即时定位和地图创建(SLAM)技术进行高质量的现实空间数据捕获。硬件特点与优势
(1)双激光雷达设计
两个多层激光雷达传感器可以捕获3D测量数据,并结合业界领先的SLAM软件,提供测量等级点云质量。

(2)工业级摄像头设计
4颗2000万像素的摄像头,完美的360°全景拍摄和720°全景拼接。安装在该设备顶部的四个摄像头可以从各个方向拍摄高分辨率的图像,而操作人员不会出现在视场中。

(3)可穿戴式与折叠式设计
穿戴式:舒适的肩部挂钩,让您的操作更轻松。紧凑的设计使其非常合适在有障碍物和不平的地面以及狭窄的空间使用。特别适用于扫描复杂的室内环境。

折叠式:展开设备即可进行扫描,自备运输箱便于运输
(4)内置显示屏设计
高分辨率显示屏内置在设备中,触摸屏能实时显示正在扫描的内容和数据质量,并可以实现免提扫描。

(5)热插拔电池设计
2块锂离子电池,并支持热插拔,可进行数小时的扫描。保证作业时间的连续性。

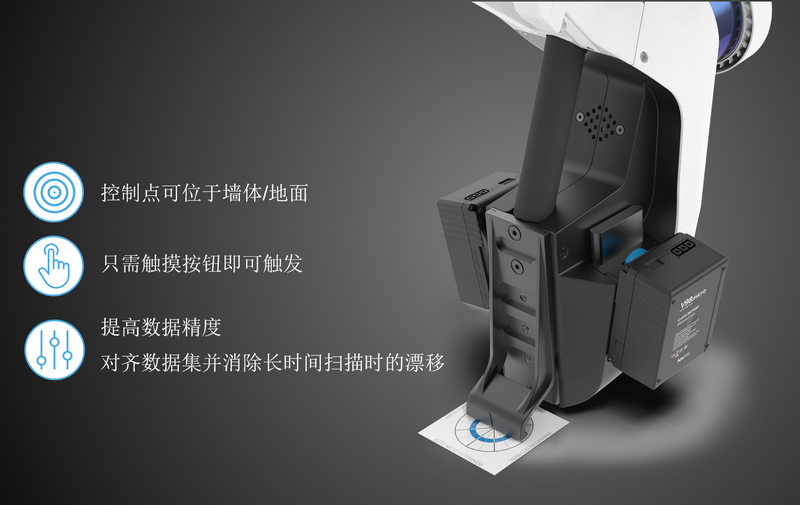
(6)控制点采集设计
将点云与墙壁和地面上的控制点对齐,以获取较高精度。
SLAM技术
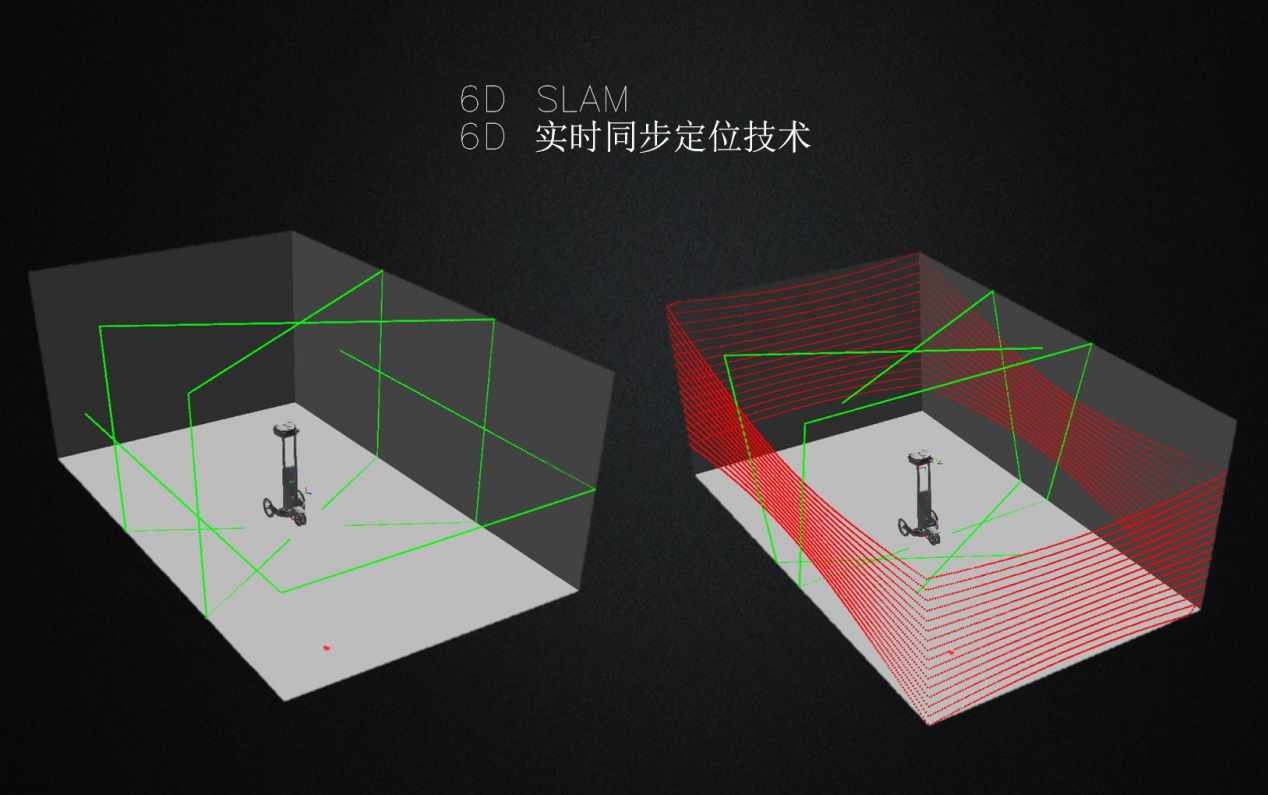
什么是SLAM?
SLAM是即时定位与地图创建的一种算法,它允许VLX构造一个地图并同时在该地图内进行自身定位。
使用了哪些传感器?
除了集成IMU(惯性测量)外,VLX还使用所有两个激光扫描仪进行创图和定位。因此,重要传感器在测绘过程中不会受到影响。
地图是如何创建的?
激光传感器产生大量测量数据,记录从相应传感器到地图环境中的物体或建筑结构的距离。SLAM连续比较输入的激光数据与之前的测量结果这样VLX就可以完成定位并注册新的传感器测量值,以构建一个一致的环境地图。
你可以在什么环境下扫描?
VLX采用创新的SLAM技术,能在几乎任何室内空间精确定位。使用VLX,您可以在复杂的室内环境上绘制地图。
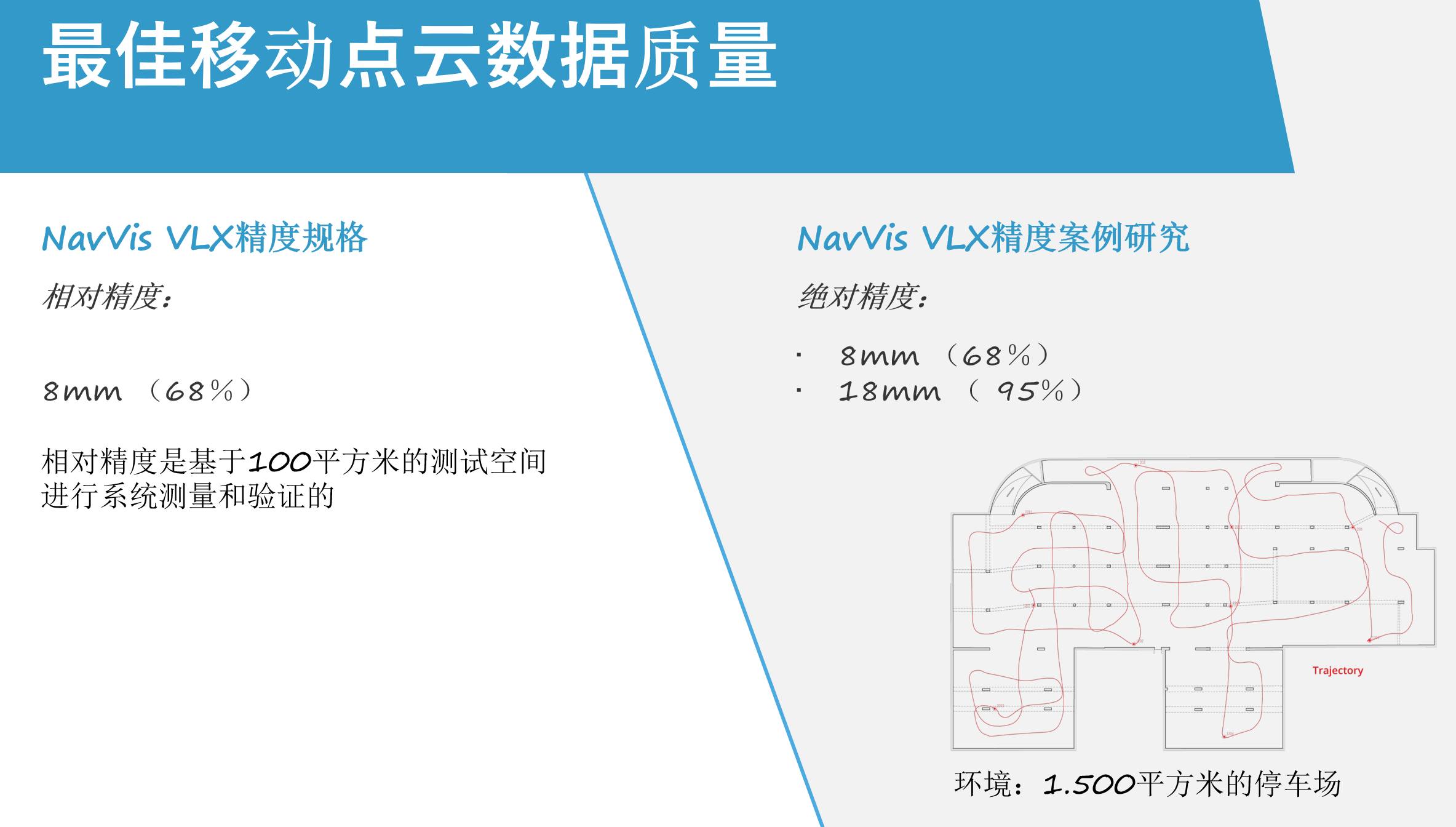
采集效率与数据质量
VLX室内移动扫描系统可以比传统的架战式扫描仪的效率快30倍,并且对建筑物使用者的干扰较小。

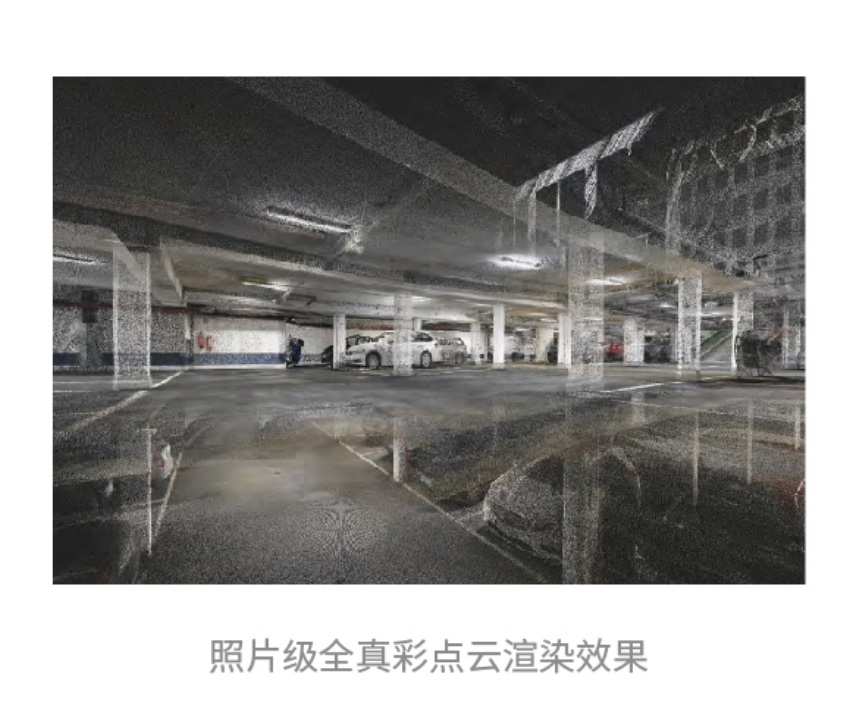
数据质量